A 25-Watt Jammer Beats a $20,000 Satellite. That's Why Your Drone Needs to Fly Blind.
A GPS satellite orbits about 20,200 kilometers above your head. By the time its signal reaches a drone receiver, it carries roughly the same power as a 25-watt light bulb seen from ten thousand miles away. A jammer sitting a few kilometers from that same drone is, in path-loss terms, a million times closer.
So the contest was never fair. A cheap ground-based jammer has trivially more signal at the receiver than the entire satellite constellation, and the receiver locks onto whatever is loudest in the band. This isn't a defect in some specific GPS chip you can swap out. It's the inverse-square law applied to a system that was never designed for anyone trying to break it. GPS-denied drone autonomy — flying without satellites, using cameras and onboard intelligence instead — stopped being an exotic research topic the moment that physics met a real adversary.
I build the navigation stacks that let drones keep flying when the satellites go dark. Over the last couple of years I've watched this go from a niche defense interest to something a mining superintendent in Sweden and a Marine Corps program officer are both calling about in the same week. The forces that did that aren't going to reverse. Let me walk you through what changed, what it actually takes to build a drone that can fly blind, and the expensive way I learned that most of the hard part isn't the algorithm.
Why a Drone That Needs GPS Is Now a Liability
For most of the last decade, "the drone lost GPS" was an inconvenience. It's now a procurement and operational dead end, and three separate forces pushed it there at once.
The first is the war in Ukraine, which turned electronic warfare from theory into weather. Russian R-330Zh "Zhitel" systems throw up multi-kilometer denial bubbles — thirty kilometers and more — that swamp the L1 and L2 satellite bands along with the 900 MHz, 2.4 GHz and 5.8 GHz control links drones rely on. Inside those bubbles, IEEE Spectrum's reporting on autonomous drone warfare documents FPV loss rates of 50% or higher to jamming, with one unit reporting nearly a third of its sorties lost to electronic warfare alone. Ukrainian operators have taken to calling GPS "a luxury we forgot existed."
Front-line operators now build airframes that ship without a GPS receiver at all, because nobody assumes the signal will be there.
That's the tell. When the people closest to the problem stop installing the part, the part is dead.
The second force is regulatory, and it landed like a guillotine. On December 22, 2025, the FCC added all foreign-produced unmanned aircraft systems and their critical components to its Covered List in a single sweeping notice, DA 25-1086. Congress, in the FY2025 NDAA, had told the FCC to act on DJI and Autel specifically. The FCC chose to act on every foreign manufacturer at once. Equipment on the Covered List can't get new equipment authorizations — existing certified models can still be sold and flown, but the procurement runway for anything built on a foreign supply chain is now finite and visibly shortening.
I watched a program manager work through what that meant for him in real time. He had a fleet plan built around DJI Matrice and Autel Evo airframes, and in one afternoon half of it became un-buyable for any new federal procurement. He asked me, half-joking, whether the rule would get walked back. It won't. The third force tells you why.
The Procurement Vacuum Is Real, and the Numbers Prove It
On March 22, 2026, the U.S. Army awarded Skydio a $52 million contract for more than 2,500 X10D drones — the largest single-vendor small-UAS contract in Army history. The detail that matters isn't the dollar figure. It's that the deal closed from bid to award in under 72 hours.
Procurement does not move that fast because someone is excited. It moves that fast when there is nowhere else to send the order. The cleared inventory of platforms that can actually fly in a contested electromagnetic environment is small, the demand is enormous, and the gap is being filled by whichever U.S. and allied manufacturers can ship a calibrated visual-navigation stack on a compliant frame today.
You can see the same urgency in who else is getting funded. Anduril took a $23.9 million Marine Corps contract for over 600 Bolt-M loitering munitions that navigate by waypoint in GPS-denied conditions. Auterion landed a $50 million Pentagon contract for 33,000 drone strike kits bound for Ukraine, then announced a joint venture for 50,000 more — and in January 2026 ran the first U.S. kinetic drone swarm strike controlled by a single operator. Shield AI has raised north of $900 million selling its Hivemind autonomy. The money is not chasing better airframes. It's chasing the software that flies them when the satellites are gone.
And underneath all of it, the list I work against every day quietly moved: the Defense Innovation Unit shifted the Blue UAS Cleared List — the roughly fifty-plus platforms federal buyers are allowed to acquire — over to the Defense Contract Management Agency in December 2025, with AUVSI's Green UAS now an authorized on-ramp to Blue. If you're a mid-tier OEM with a Blue-eligible frame and no deep autonomy team, that list is both your opportunity and your problem.
The Physics Doesn't Care Whether You're at War
The civilian version of this is geometry, not warfare, and it's where I do a lot of my actual work.
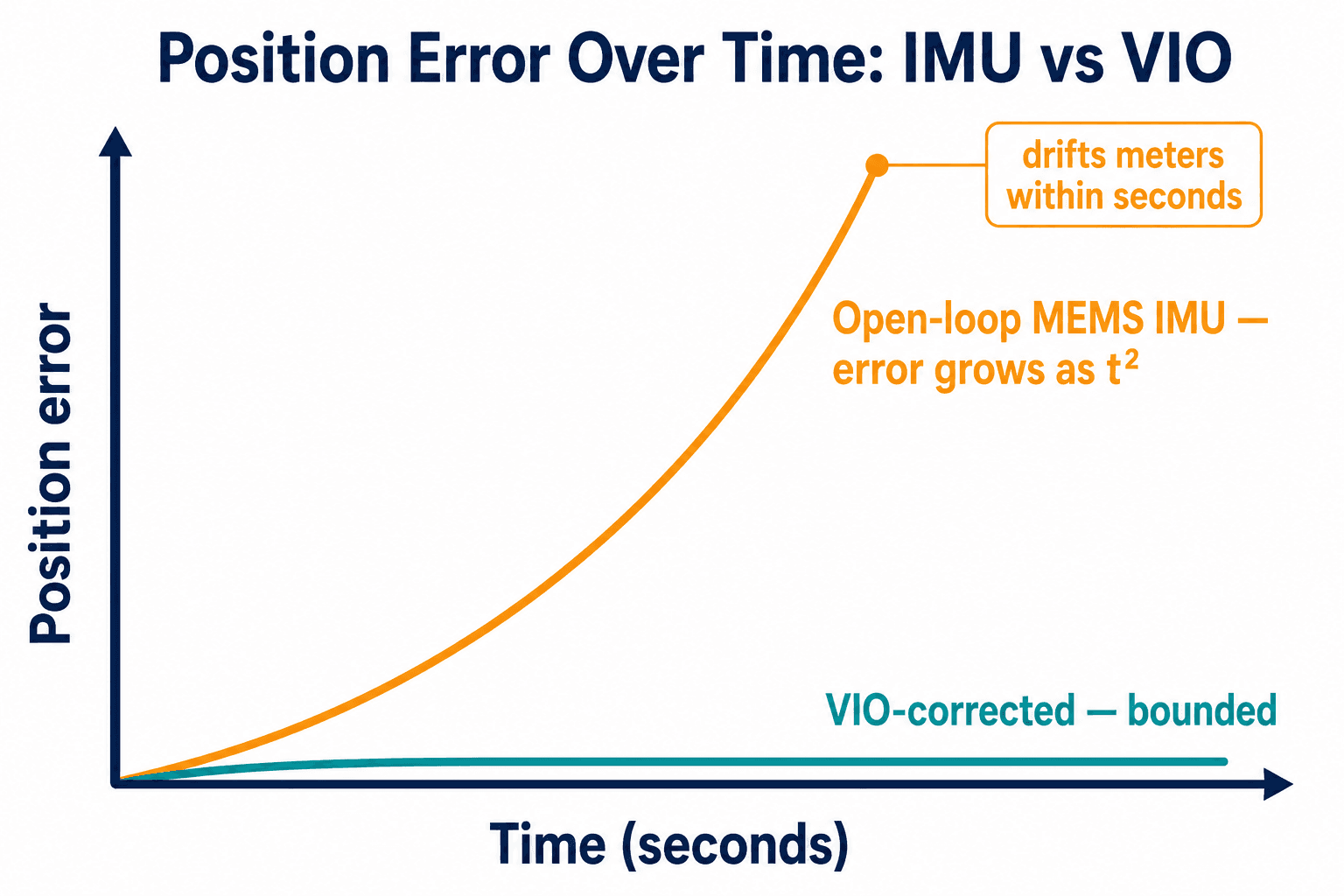
An inertial measurement unit — the little accelerometer-and-gyro package every drone carries — is a fast sensor but a deeply noisy one. You compute position by double-integrating acceleration, which means any small error grows with the square of elapsed time. A consumer-grade MEMS unit left to run open-loop in an underground mine drifts meters within seconds. The drone has no external reference to notice the drift, and so it doesn't notice. The operator finds out when the airframe puts itself into a wall.
Without a position fix from outside, a drone doesn't know it's lost. It flies its own error straight into the rock.
The economic case for fixing this is brutal in the best way. At LKAB's Kiruna iron ore operation in Sweden, an eight-hour manual stope inspection became a twenty-minute drone flight — a ratio that holds across most confined-space work, where drone surveys cut costs by up to 70% against sending in a crew. On the energy side, a single oil-and-gas pipeline failure runs about $8.5 million in cleanup, penalties and remediation, against a $75,000 routine inspection that would have caught the corrosion. The NIST-commissioned RTI study put the cost of a national GPS outage at roughly a billion dollars a day.
But every one of those numbers depends on the drone reaching the inspection point. Industrial platforms cost $10,000 to $50,000 each, and a non-autonomous drone in a confined shaft will crash on its first handful of flights. Fly under a steel bridge or alongside a tank farm and multipath reflections drift your position by several meters — exactly when you need centimeter-level station-keeping for high-resolution photogrammetry. The ROI doesn't close on a drone you keep replacing.
How Do You Fly a Drone Without Satellites?
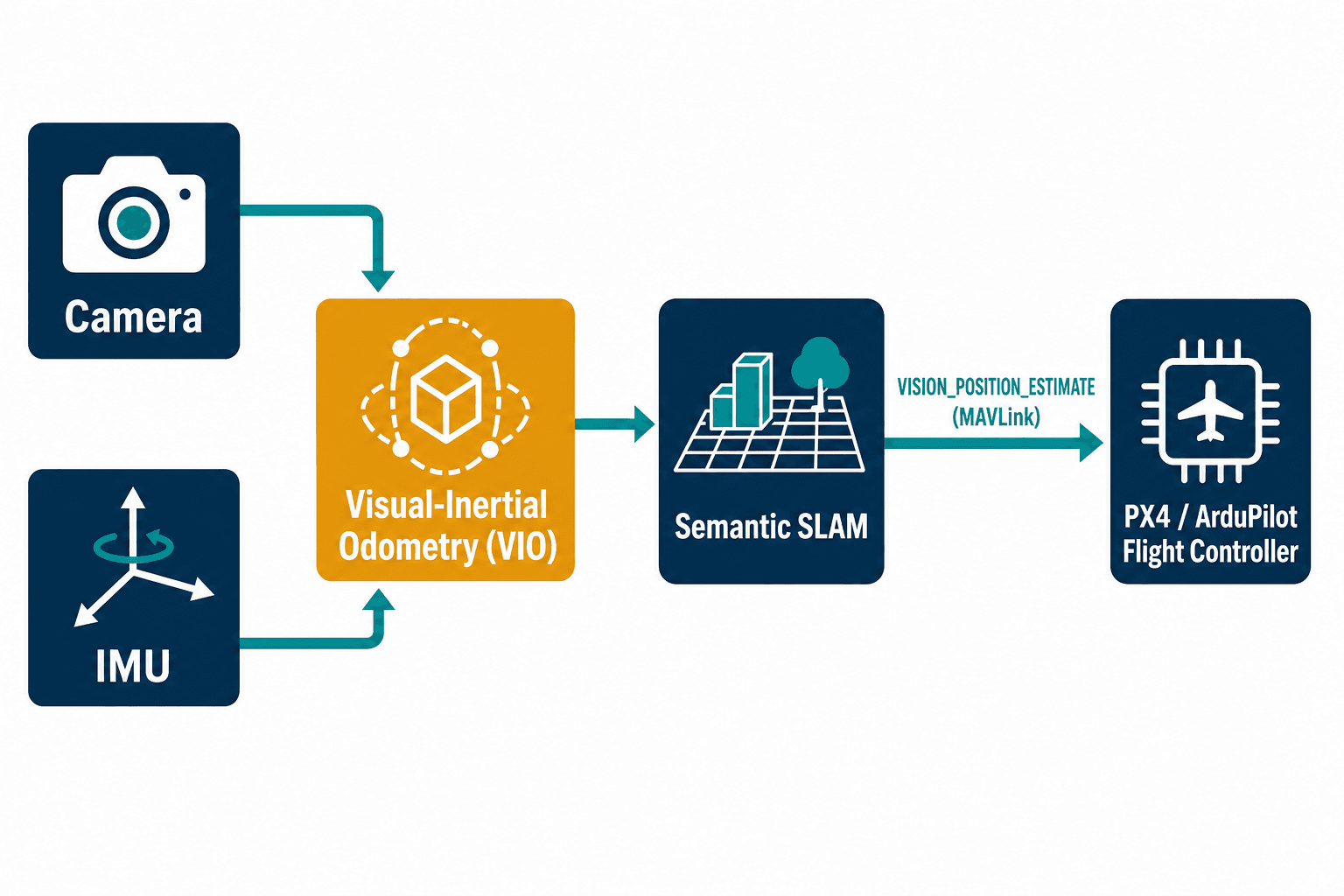
The answer is to replace the satellite with the drone's own eyes. Visual-inertial odometry, or VIO, fuses the camera feed with the IMU: the cameras give you a slow but absolute sense of where features in the world are, the IMU gives you fast motion between camera frames, and a good estimator blends them so each covers the other's weakness. Layer semantic SLAM on top — the drone building a map while recognizing what's in it — and you get an airframe that knows where it is in a tunnel it has never seen.
None of the building blocks are secret. NVIDIA gives away cuVSLAM through Isaac ROS, GPU-accelerated and tuned for their Jetson boards. ORB-SLAM3 is a mature open-source system with native multi-map support, though its GPLv3 license is a real problem if you're shipping closed-source defense software. VINS-Fusion will happily blend GPS and vision when both exist. The open autopilots, PX4 and ArduPilot, already accept an external position estimate over a MAVLink message called VISION_POSITION_ESTIMATE. On paper, you wire a camera to a companion computer, run a SLAM package, pipe the pose to the flight controller, and you're done.
I believed that on paper too. Then I shipped it.
The Wall We Flew Into — Literally
Early on, a customer with a fleet of perfectly good non-autonomous inspection drones wanted GPS-denied capability without buying new $200,000 airframes. Reasonable ask. We dropped a solid open-source VIO baseline onto their existing hardware, tuned it on the bench until the point cloud looked beautiful, and sent it underground.
It drifted into a wall.
Not because the algorithm was wrong. Because the cameras and the IMU on that airframe were never hardware time-synchronized. The image timestamps and the motion timestamps disagreed by a few milliseconds that wandered over time, and to a visual-inertial estimator that jitter is indistinguishable from the drone actually moving. The filter was faithfully integrating a lie. I stood in that mine looking at a recovered, dented $30,000 drone, realizing the thing I'd sold as a software project had a hardware problem at its root.
That flight reorganized how I work. On a retrofit, the first deliverable is almost never code — it's a change order. If your cameras are loosely mounted, or there's no hardware sync line between sensor and IMU, no SLAM package on earth will save you, and the honest move is to say so before anyone writes a check. I'd rather lose the easy version of the deal than ship the dented version.
Why Doesn't the Free Open-Source Stack Just Work?
The other illusion is that because the algorithms are free, the system is easy. The bottleneck isn't availability. It's making any of it run fast enough on a power budget a drone can carry.
There's a newer front-end, SuperPoint-SLAM3, that swaps the classic hand-engineered feature detector for a learned one and cuts translational drift on the standard KITTI benchmark from 4.15% to 0.34% — roughly a twelve-fold improvement. The catch: that learned front-end runs at about 14 frames per second on a Jetson Orin Nano. A drone flying a real control loop wants 30-plus. I spent more than one night watching a calibration log scroll while a Jetson thermal-throttled at 25 watts, trying to claw back frame rate.
The way out is unglamorous: TensorRT INT8 quantization to roughly triple throughput, offload the image pipeline to the board's vision accelerators, and choose hardware honestly. A Jetson Orin NX at 100 TOPS is the real sweet spot where VIO, semantic SLAM and object detection can coexist; ModalAI's VOXL 2 and Starling 2 give you a Blue-Framework-compliant package if you'd rather not build the carrier board yourself. Picking among those, calibrating the cameras, fitting everything inside the thermal envelope — that's the work. The free algorithm is maybe a fifth of it.
The algorithms are open source. The twelve to twenty-four months of robotics integration that make them fly are not.
So Why Not Just Buy Skydio?
People ask me this constantly, and it's a fair question. Skydio builds a genuinely excellent closed, integrated stack — their X10D holds visual navigation up to nearly 1,000 feet of altitude. If you want a finished platform off the shelf and your mission fits theirs, buy it. I'm not going to compete with a closed integrated product, a company with a $900 million war chest, or the team that maintains PX4. That's not the gap.
The gap is everyone Skydio's catalog doesn't fit. The mid-tier U.S. and allied OEM with a Blue-eligible frame — a Freefly Astro, an Inspired Flight — and no in-house VIO team. The mining or infrastructure operator who already owns a fleet and wants to retrofit autonomy instead of replacing it with $200,000 caged inspection drones. The defense prime chasing an SBIR, STTR, or AFWERX award who needs a sub-prime with embedded computer-vision depth they don't keep on staff. For those buyers, the question isn't "which drone?" It's "who turns the frame I'm allowed to buy into one that flies blind?" That's the work I do, and it's what the GPS-denied drone autonomy practice at Veriprajna exists to deliver — the calibrated, flight-tested payload, not another airframe.
And because I've watched the easy promises blow up, let me tell you what I won't do. I don't manufacture airframes, motors, or props. I can't hand you ITAR registration, CMMC certification, or a facility clearance — those are your processes, not mine. ATEX certification for explosive atmospheres, the kind a coal mine demands, is six to twelve months and roughly another $100,000 of testing on top of the autonomy build, and pretending otherwise just wastes your money. And I'm not a substitute for your own flight test — you still need a pilot and a range. The fastest way to lose a robotics customer is to oversell the part that lives outside the code.
What This Actually Means
The thing I'd want a buyer to walk away understanding is that the inverse-square law isn't going to issue a correction. A cheap jammer will always beat a distant satellite, the FCC list will keep getting shorter, and the drone that has to phone a satellite to know where it is has a single point of failure baked into its physics.
The drones that matter from here are the ones that fly on what they can see. Building that isn't a download — it's sensor calibration, hardware time-sync, a learned front-end quantized to fit a thermal budget, and enough flight tests in real tunnels to trust the thing not to drive itself into a wall. I learned the cost of skipping any of those steps the way you'd expect: standing in a mine, holding the dented evidence. If you want to know what fits your frame and your mission, that's the conversation to start — before the satellites are the thing you find out you were depending on.