The Bald Head That Broke Our AI (And What It Taught Me About Building Vision Systems That Actually Work)
In October 2020, a Scottish soccer match between Inverness Caledonian Thistle and Ayr United became the most instructive AI failure I have ever studied. An automated camera system, built to track the ball and broadcast the game without a human operator, spent the entire match lovingly following the bald head of a linesman standing on the sideline. Fans at home missed every goal. The internet had a field day.
I laughed too, at first. Then I stopped laughing, because I realized my team was building systems with the exact same blind spot.
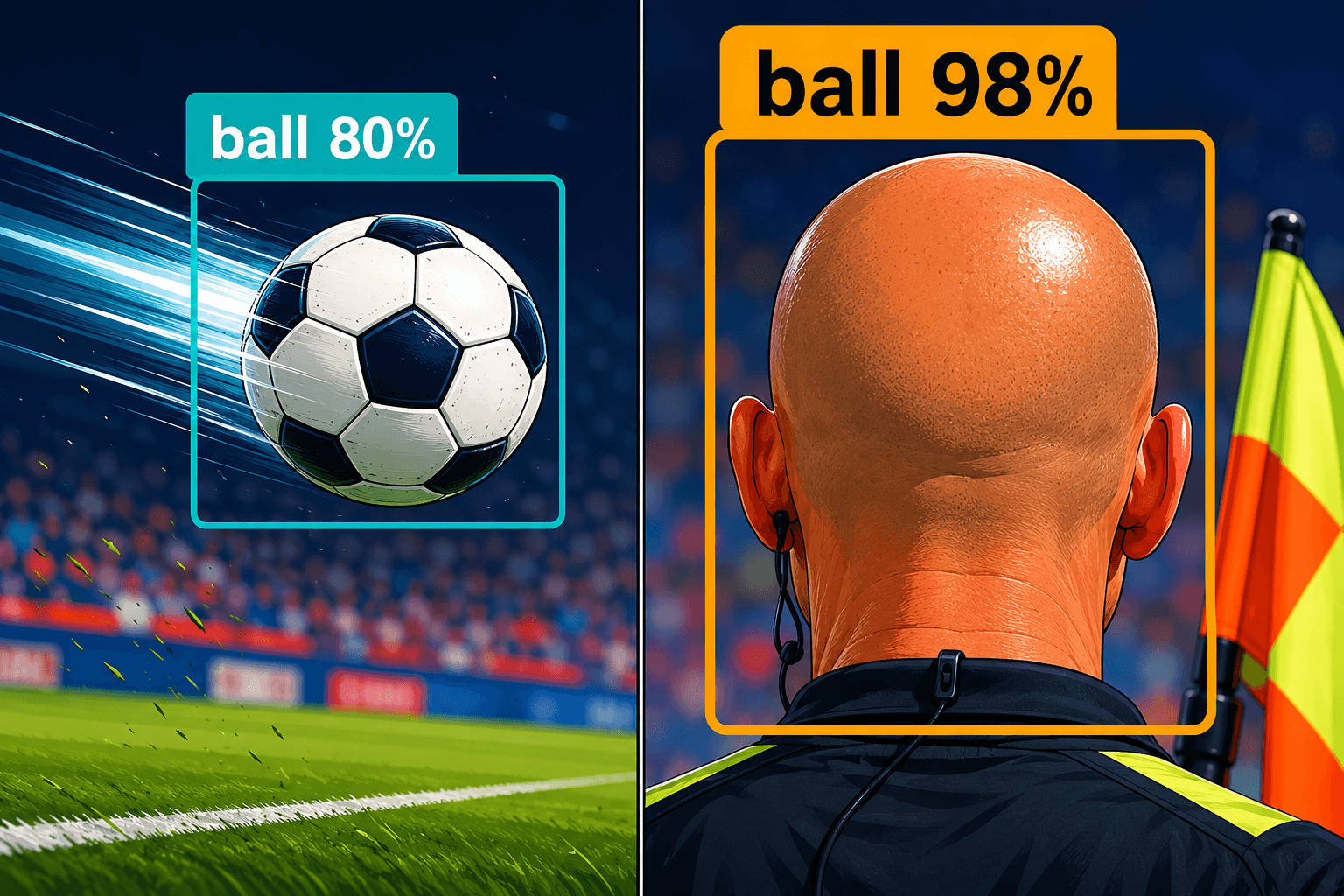
The camera's AI had done its job perfectly by its own logic. It found a round, light-colored object under stadium floodlights and assigned it a 98% confidence score for "ball." The actual ball -- moving fast, blurring through shadows, occasionally occluded by players -- scored around 80%. The system followed the math. The math was disconnected from reality. That gap between detecting a pattern and understanding what you are looking at is where I have spent the last several years of my life, and it is the reason I started building physics-constrained vision systems at Veriprajna.
What Does an AI See When It Looks at the World?
Most computer vision systems process images the way a very confident toddler identifies animals at the zoo. Round and shiny? Ball. Four legs? Dog. The resemblance is not a joke -- modern Convolutional Neural Networks (CNNs) decompose images into textures, edges, and shapes, then match those features against patterns learned from training data. They are, at their core, texture-matching machines.
This works astonishingly well in controlled conditions. It falls apart the moment the physical world starts being physical.
Object detection is not object understanding. A system that sees a round thing and calls it a ball has identified a texture. A system that rejects that identification because the "ball" has been hovering at 5.5 feet for three minutes -- that system understands something.
The Inverness camera could not distinguish a head from a ball because it had no concept of what a ball does. A soccer ball follows projectile motion. It accelerates on impact. It travels at speeds up to 80 mph. It cannot be attached to a human torso moving at walking pace. These are not exotic insights -- a child watching the match would have known. But the AI operated in what the computer vision community calls "frame-independent inference," processing each image as an isolated snapshot with no memory of what came before and no expectation of what should come next.
The Night I Realized We Had the Same Problem
I wish I could say I arrived at physics-constrained vision through some elegant theoretical insight. The truth is uglier. We were building a defect inspection system for a semiconductor client, and our model was flagging dust particles as circuit defects. Not occasionally -- constantly. The false positive rate was destroying the production team's trust in the system, and they were right not to trust it.
I remember sitting in front of the results at 2 AM, furious, because our model was accurate by every benchmark metric we tracked. It identified defects correctly over 90% of the time on standard test data. But the production environment was not standard test data. Dust landed on wafers. Lighting shifted between inspection stations. The model saw a dark spot and called it a defect, just like the Inverness camera saw a round shape and called it a ball.
My CTO and I argued for a week about the fix. He wanted more training data. I wanted to change the architecture. The argument ended when I asked a simple question: "Does our model know that a dust particle and a circuit defect behave differently under multi-angle imaging?" It did not. A real defect -- a physical pit or scratch in silicon -- shifts position predictably when you image it from different angles. Parallax. A dust particle sitting on the surface behaves differently. We were asking a texture matcher to do a physicist's job.
That was the turning point. We stopped trying to make the neural network smarter and started making it obey the laws of physics.
The Demo That Went Sideways
Three months after the semiconductor pivot, I was in a conference room pitching our new approach to a logistics company. Fifteen people on their side of the table. I had built a live demo showing our physics-constrained tracker following a package through a simulated warehouse, predicting its position through occlusions, rejecting false detections.
The demo started flawlessly. Then somebody's phone rang, and a flash of reflected light from the screen hit our camera at exactly the wrong angle. The tracker stuttered. The bounding box jumped to a ceiling light fixture and stayed there for three agonizing seconds before the physics layer corrected it.
I stood there watching my own software fail in the exact way I had spent months claiming it would not. The room went quiet. I wanted the floor to open up.
The physics layer recovered. That was the point. But in those three seconds, I understood something no benchmark had ever taught me: in production, trust is not about average accuracy. It is about what happens in the worst frame.
I said that out loud, half to the room and half to myself. "A generic system would still be tracking that ceiling light. Ours corrected. That recovery is the product." The CTO across the table nodded slowly. They signed two weeks later. But I went home that night and rewrote our confidence-display logic so the system would show its uncertainty in real time -- because I never wanted to stand in front of a client again pretending the math was magic.
Why Do 90% Accurate AI Systems Fail in Production?
There is a trap I now call the "90% problem," and I watch company after company walk into it. Generic computer vision APIs -- the kind you can spin up from any major cloud provider in an afternoon -- get you to 90% accuracy fast and cheap. In a demo, they look magical. The business value lives entirely in the last 10%.
That last 10% is where the bald heads are. The shadows that look like walls to an autonomous vehicle, triggering phantom braking on a highway. The moment a customer's hand obscures a product in a cashierless store. The rare semiconductor defect that looks identical to a harmless 2-nanometer dust particle.
In semiconductor manufacturing, improving defect detection accuracy by just 1% can lead to a 5-10% yield increase, saving millions annually. In autonomous vehicles, Tesla owners have reported widespread phantom braking incidents where vision systems misinterpret shadows and overpasses as obstacles. These are not theoretical risks. They are production failures happening right now, across industries, because the underlying AI has no physical intuition. Our work bridges that gap from 90% to 99.99% by adding the physics layer that generic APIs lack.
How We Taught Our Systems to Think Like Physicists

The core idea is deceptively simple: treat the output of a neural network not as a fact, but as a noisy measurement that must be validated against physics. I wrote about the full technical architecture in the interactive version of our research, but the intuition matters more than the math.
Imagine you are tracking a soccer ball. Your camera says the ball is at midfield, moving east at 20 meters per second. A fortieth of a second later, your camera says the "ball" is now 15 meters away, on the sideline, moving at walking pace. A Kalman Filter -- a mathematical framework that maintains a running belief about where an object is, how fast it is moving, and how certain it is about both -- would reject that second measurement instantly. The implied acceleration is physically impossible for a soccer ball. The system calculates what is called a Mahalanobis Distance -- essentially, how many standard deviations the new measurement is from the prediction. If it exceeds 3 sigmas, the detection gets thrown out, regardless of how confident the neural network is about those pixels.
This is what I mean by physics-constrained vision. The neural network proposes. Physics disposes.
We layer multiple gates on every detection. A kinematic gate checks whether the object could physically be where the network says it is. An optical flow gate verifies that the pixel motion inside the bounding box matches what you would expect from a real moving object -- a stationary linesman generates nearly zero flow, while a ball in flight generates a distinctive pattern. A geometric gate checks whether the object's apparent size is consistent with 3D perspective at its claimed distance from the camera.
Any detection that fails any gate gets rejected. No exceptions, no overrides.
What Happens When the Object Disappears?
Generic systems panic. The confidence score drops to zero. The tracker declares the object "lost" and either freezes or resets. In the physical world, this is absurd. A ball moving at 20 meters per second does not cease to exist because a player ran in front of the camera. It keeps moving, decelerating slightly from drag, following a trajectory that physics can predict with remarkable precision.
Our systems maintain the object in memory during occlusion, projecting its position forward based on pre-occlusion trajectory. When the object reappears, the system is already looking in the right place. I think of it as giving the AI object permanence. My two-year-old nephew figured this out around month eight. Most production vision systems still have not.
"Just Use a Bigger Model"

People say this to me constantly. An investor said it to me verbatim during a pitch in 2023, leaning back in his chair like he had just solved our entire technical problem. "Why not just fine-tune a foundation model? Why build all this physics stuff?"
I paused. "Because physics does not change when your training distribution shifts."
A PINN does not just learn from data. It learns from data constrained by reality. The difference is the difference between memorizing answers and understanding the subject.
Physics-Informed Neural Networks -- PINNs -- are one of the most elegant ideas in modern machine learning. A standard neural network minimizes the gap between its predictions and labeled training data. A PINN adds a second penalty: the network is also punished whenever its predictions violate a physical equation. If it predicts a trajectory where a ball turns mid-air without external force, the governing differential equation is violated, the loss spikes, and the network learns not to do that.
The practical consequence is dramatic. A PINN needs far less training data because the laws of physics eliminate most of the solution space before training begins. It generalizes to conditions it has never seen because it has internalized the rules, not just memorized the examples. For our work in sports tracking, this means we can predict the curve of a knuckleball or a bending free kick from the initial trajectory -- the camera pans ahead of the action instead of chasing it. For the full technical breakdown of PINNs and Hamiltonian Neural Networks, I go deeper in our research paper.
The Build-vs.-Buy Question Nobody Asks Honestly
Every enterprise leader I talk to faces the same choice: buy an off-the-shelf vision API or build something custom. The honest version of this conversation, which rarely happens, goes like this.
Buying gets you to production fast. The API works on day one. It handles standard cases well. The total cost of ownership looks low on a spreadsheet.
Then the edge cases arrive. The false positives pile up. You hire humans to review the AI's work, which defeats the purpose. You discover the vendor's model cannot be fine-tuned for your specific physics. You realize your data is leaving your premises. And you have built zero intellectual property.
Building a physics-constrained system costs more upfront. There is real engineering involved. But the false positive rate drops by orders of magnitude because physics filters out the noise that data alone cannot. The system runs on your infrastructure, with your data, producing models you own. The long-term total cost of ownership favors building for any application where errors are expensive -- which, in my experience, is every application worth automating.
I am not saying every company should build from scratch. I am saying that if your AI cannot tell a ball from a bald head, the subscription fee is the least of your costs.
Context Is the New Accuracy
I sat in the back row of a conference last year, listening to a panel debate whether AI needs "common sense." Four researchers, forty-five minutes, no resolution. I kept thinking: we do not need common sense. We need physics. Common sense is vague. Physics is a set of equations you can code.
The AI industry has spent a decade optimizing for accuracy on benchmark datasets. Models with billions of parameters can identify thousands of object categories with superhuman precision -- on test images that look like the training images. The next decade belongs to context. Not bigger models, but smarter constraints. Not more parameters, but more physics.
Does your AI know the difference between a ball and a head? If it only relies on pixels, the answer is "sometimes." If it relies on physics, the answer is "always."
I think about that Scottish soccer match more than I probably should. A bald man standing on a sideline, minding his own business, accidentally exposing the fundamental fragility of an entire generation of AI systems. The fans who missed the goals were frustrated. I was grateful. That linesman taught me more about building real AI than any paper I have read.
The future of computer vision is not in seeing more. It is in understanding what you see.