We Fired the Cloud From Our Factory Floor — And It Was the Best Engineering Decision We Ever Made
The defective part had already been packed by the time the cloud told us it was bad.
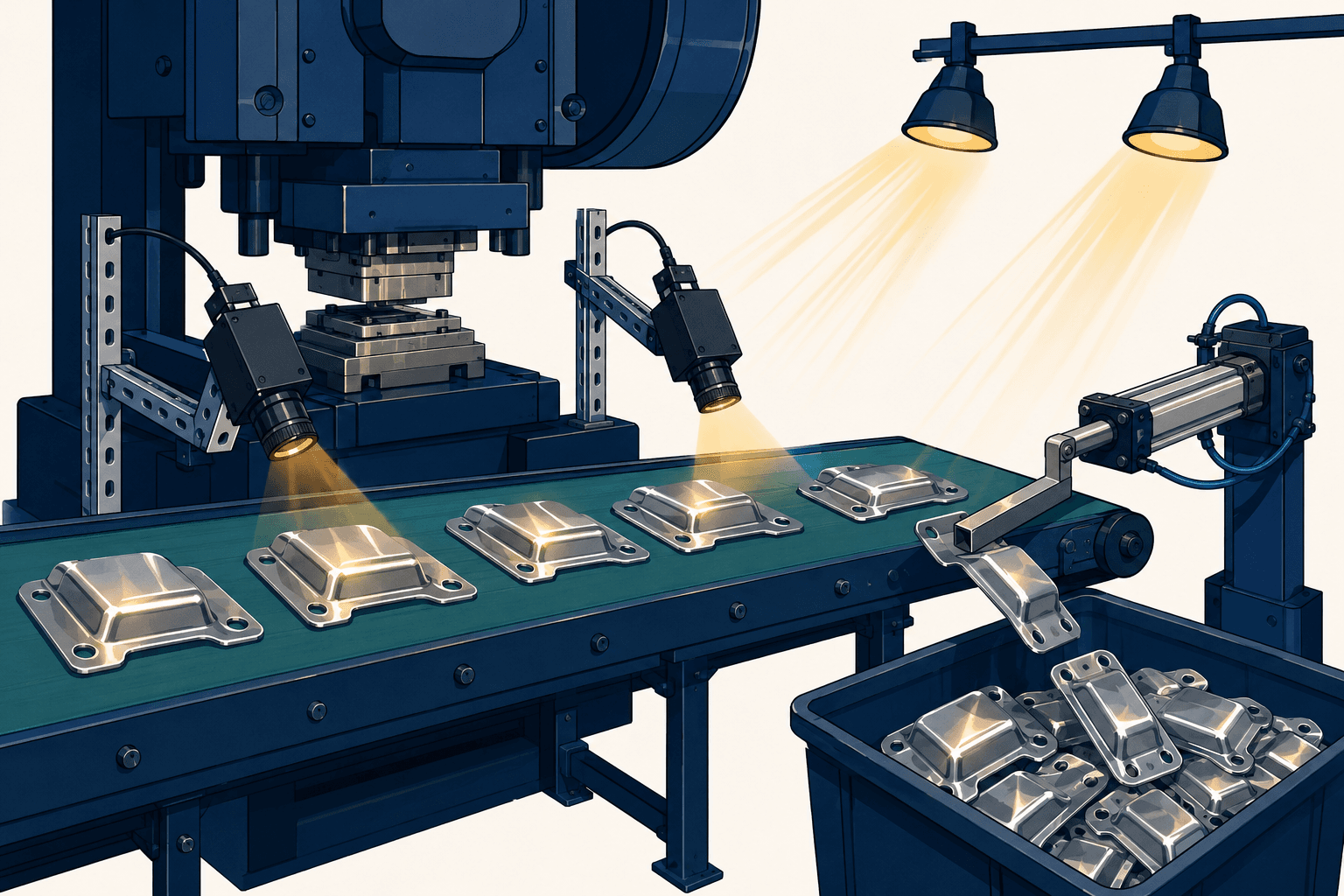
I remember standing on the factory floor with my engineering lead, watching the conveyor belt run at its usual clip — two meters per second, nothing unusual — while we waited for results from the cloud-based vision API we'd spent weeks integrating. The camera captured the frame. The image flew to a data center hundreds of miles away. The model ran inference. The result came back: "Defect Detected."
Correct answer. Completely useless.
In the 800 milliseconds it took for that round trip, the part had traveled 1.6 meters. The pneumatic ejector was 1 meter downstream from the camera. The part blew past it by 60 centimeters. It was sitting in a box with the good parts, ready to ship.
My engineering lead looked at me. I looked at the conveyor. And in that moment, I understood something that no architecture diagram or cloud provider sales deck had ever made clear: the speed of light is not a feature you can upgrade. The internet is probabilistic. The conveyor belt is not. And when you put a probabilistic system in charge of a deterministic process, physics wins every single time.
That was the day we fired the cloud from the factory floor.
The 800-Millisecond Education

Let me be precise about what 800 milliseconds actually means, because in the world of human-computer interaction, it sounds like nothing. You click a link, a page loads in 800ms, you don't even notice. But on a manufacturing line, 800ms is an eternity measured in centimeters.
Here's the math that changed everything for me. A conveyor running at 2 m/s with a camera-to-ejector distance of 1 meter gives you a hard deadline of 500 milliseconds. Not a soft deadline. Not a "best effort" target. A wall. If your control signal arrives at 501ms, the part has physically passed the ejector. There's no retry. There's no buffer. Atoms don't wait for bits.
Our 800ms round trip wasn't even close. And when I broke down where those milliseconds went — image encoding (20–40ms), the upload through the factory's firewall and ISP (100–300ms), network routing and jitter (50–200ms), cloud queueing (50–100ms), actual inference (50–150ms), and the return trip (100–200ms) — I realized we hadn't built a control system. We'd built a very expensive reporting system that told us about problems after they'd already become someone else's problem.
Late data in a control loop isn't just useless — it's dangerous. The system state has already changed. Acting on stale information is worse than not acting at all.
The thing that really stung? The AI model itself was excellent. It correctly identified the defect. The intelligence was there. But we'd put that intelligence in the wrong place — hundreds of miles from the thing it was supposed to control.
Why Does Cloud AI Fail on the Factory Floor?
People always push back when I say the cloud doesn't work for real-time manufacturing control. "What about 5G?" they ask. "What about faster connections?"
I had this exact argument with a potential investor early on. He'd seen the marketing materials from a major telecom — 1ms air interface latency, the future of connected everything. "Just use 5G," he said, like it was obvious.
So I walked him through what a factory actually looks like from a radio frequency perspective. Steel beams everywhere, creating signal reflections. High-voltage motors and arc welders generating electromagnetic interference that jams wireless signals. Forklifts driving between sensors and access points, breaking line-of-sight connections. A factory is basically an RF nightmare designed by someone who hates wireless engineers.
And even if you solved all of that — even if you got perfect 5G coverage with mmWave — you've still got the fundamental problem of TCP/IP. The internet's transport protocol is designed for reliability, not timeliness. If a packet drops, TCP waits, requests retransmission, waits again. That's great for email. It's poison for a control loop where you need a response in under 500 milliseconds, every time, with zero variance.
The variance is the killer. It's not just that cloud latency is high — it's that it's unpredictable. One request takes 400ms, the next takes 1,200ms. You can't build a safety system on a communication channel where you don't know if the answer will arrive in time. I wrote about this in more depth in the interactive version of our research, but the short version is: we refuse to build safety-critical systems on a protocol designed for best-effort delivery.
Twelve Milliseconds

The solution, once we saw it, felt almost embarrassingly obvious. Stop sending the data to the compute. Bring the compute to the data.
We took an NVIDIA Jetson device — essentially an embedded supercomputer about the size of a credit card — and mounted it directly on the conveyor frame, less than a meter from the camera. We took our vision model, quantized it from 32-bit floating point down to 8-bit integer precision, and compiled it with NVIDIA's TensorRT optimizer.
The first time we ran it, the total pipeline latency — capture, preprocess, infer, postprocess — was 12 milliseconds.
I'll never forget the moment. My team had been skeptical about the quantization step. There was a heated debate in our office about whether dropping from FP32 to INT8 would destroy the model's accuracy. One of my engineers was convinced we'd lose too much precision to be useful. We ran the calibration, deployed the quantized model, and the accuracy dropped by less than 1%. For a binary defect detection task — scratch or no scratch — the difference between 99.5% confidence and 99.1% confidence is meaningless. Both trigger the rejection.
But the speed difference was staggering. At 12ms, the part travels just 2.4 centimeters during processing. We had 97.6 centimeters of safety margin before the ejector. That's not tight. That's luxurious. We went from missing every defect to having enough time to run multiple verification passes on each part.
We reduced inference latency from 800ms to 12ms — a 98.5% improvement — by moving the AI from a data center to a device you can hold in your hand.
The technical details matter here, and they're worth understanding even if you're not an engineer. The Jetson's unified memory architecture means the CPU and GPU share the same physical memory. In a traditional PC with a discrete GPU, you waste milliseconds copying image data from system RAM to GPU memory. On the Jetson, the GPU reads the camera buffer directly. TensorRT fuses multiple neural network layers into single operations, eliminating redundant memory accesses. These aren't marginal optimizations — a standard YOLOv8 model runs at about 35ms in PyTorch on a Jetson, but after TensorRT INT8 conversion, it runs at 3.2ms. The software optimization alone delivers a 10x speedup on the same hardware.
The Hidden Factory Eating Your Profits
Here's what surprised me most about this work: the catastrophic failures aren't what cost manufacturers the most money. It's the micro-stoppages.
Everyone in manufacturing knows the headline number — unplanned downtime in automotive costs an average of $22,000 per minute. Siemens updated that figure in 2024 for large plants: $2.3 million per hour. Those numbers are real, and they're terrifying. A $7,000 edge AI system pays for itself if it prevents 19 seconds of downtime per year. Nineteen seconds.
But the number that kept me up at night was different. When a cloud-based AI system experiences network jitter — and in a factory full of electromagnetic interference, it will — the line pauses to re-sync. Maybe 30 seconds. Maybe less. Nobody writes an incident report for a 30-second pause. It just... happens. Ten times a day. Five minutes lost.
Over a year, that's 30 hours of lost production. At $22,000 per minute, those "minor" network glitches cost $39.6 million annually. Not from a catastrophic outage. From the accumulated weight of a system that hiccups because it depends on an internet connection to think.
We started calling this the "Hidden Factory" — the ghost production line running in reverse, consuming money through micro-stoppages that nobody tracks because each individual one seems too small to matter. Edge-native AI eliminates them entirely. The Jetson doesn't care if the WiFi is down. It doesn't care if the ISP is having a bad day. It processes the frame, makes the decision, and triggers the actuator — all through local electrical connections that have bounded, predictable, microscopic latency.
What Happens When You Teach a Factory to Listen?
About six months into our edge vision deployments, one of my engineers came to me with an idea that I initially dismissed. "What if we stop just looking at the machines," she said, "and start listening to them?"
I'm glad she was persistent, because acoustic AI turned out to be the most consequential technical direction we've taken.
Here's the problem with cameras: they can only see what's visible. And the most expensive failures in manufacturing — seized bearings, cracked spindles, cavitation in pumps — happen inside the machine, invisible to any camera until the moment of catastrophic failure. By the time you can see the damage, you're looking at a $50,000 repair bill and two days of downtime.
Sound, it turns out, is a leading indicator where vibration is a lagging one. Traditional accelerometers detect vibration after physical damage — spalling, pitting — has already occurred on the bearing race. But when a bearing starts losing lubrication or develops a microscopic crack, the increased friction generates high-frequency stress waves in the ultrasonic range, 20 to 100 kHz, weeks before vibration sensors would trigger an alarm.
Ultrasound can detect lubrication failure weeks before vibration sensors notice anything wrong. That's the difference between a $500 bearing swap and a $50,000 spindle replacement.
We built what I call the 5-millisecond kill-switch. High-frequency MEMS microphones sampling at 96kHz or 192kHz feed into a TinyML microcontroller — not even a Jetson, just a tiny ARM Cortex-M7 chip — running a lightweight 1D convolutional neural network trained on the spectral signature of healthy versus failing bearings. When the model detects the specific frequency pattern of a cracking bearing or lubrication loss, it triggers the machine's emergency stop circuit through a GPIO pin.
Two milliseconds to acquire enough audio. Less than one millisecond for inference. Less than one millisecond for the electrical signal. Five milliseconds total, and the machine stops before the heat builds up enough to fuse the metal.
For the full technical breakdown of how we handle beamforming and signal isolation in noisy factory environments, see our research paper. The short version: by using arrays of 64 or 124 microphones and measuring time-of-arrival differences, we can mathematically "steer" the system's listening focus to a specific point in 3D space — the bearing housing — while muting everything else, even in a 100-decibel industrial environment.
The Ball Bearing That Changed My Mind
I need to tell you about the moment I became a true believer in acoustic AI, because it wasn't the theory that convinced me. It was watching it work.
One of our clients, an automotive parts manufacturer, had a recurring nightmare: metal shavings from their machining process would occasionally contaminate the coolant system feeding their CNC spindles. When contaminated coolant hit the spindle bearings, they'd degrade fast. The operators' diagnostic method was literally listening for "bad noises" while standing next to the machine. By the time a human ear could detect the problem, the spindle was already destroyed. Each incident cost $45,000 in replacement parts plus two days of downtime.
We installed a non-contact acoustic sensor pointed at the spindle housing and trained a TinyML model on the specific frequency shift — a broadening of energy around 25kHz — that occurs when contaminated coolant starts increasing friction in the bearing.
The first real detection happened on a Tuesday afternoon. The system flagged the anomaly and triggered the kill-switch in 5 milliseconds. The machine stopped. When maintenance opened it up, the bearing was damaged but the spindle shaft was completely intact. Repair cost: $800. The entire sensor system paid for itself in that single event — not over months of accumulated savings, but in one moment where 5 milliseconds was the difference between an $800 fix and a $45,000 catastrophe.
The plant manager called me that evening. He didn't talk about ROI or payback periods. He said, "It heard something my best operator couldn't hear."
Why Not Just Fix the Cloud Connection?
People ask me this constantly, and it's a fair question. Why not invest in better networking instead of moving everything to the edge?
Three reasons.
First, you can't fix physics. The speed of light in fiber is about 200,000 km/s. A round trip to a data center 500 miles away takes a minimum of 8ms just for the light to travel, assuming zero processing, zero queueing, zero routing — none of which is realistic. Add real-world network behavior and you're back to hundreds of milliseconds with unpredictable variance.
Second, the bandwidth economics are brutal. A single quality control station with four 4K cameras running at 30 FPS generates about 80 Mbps of compressed video. A factory has hundreds of stations. Streaming 8 Gbps of video to the cloud 24/7 means massive dedicated fiber backhauls, cloud egress fees that can run tens of thousands of dollars monthly, and storage costs on top of that. With edge processing, we reduce the data that needs to leave the factory by over 99% — only anomaly frames get uploaded for record-keeping.
Third — and this is the one that surprises people — security. Cloud-based AI requires a constant stream of sensitive data to leave the factory premises. Images of prototypes. Production rates. Proprietary assembly techniques. Defense manufacturers under ITAR regulations can't put this data on shared public cloud servers, period. Our edge architecture restores the air gap. The raw image data never leaves the device's RAM. Only metadata — "Part #1234: PASS" — goes to the dashboard.
The post-cloud factory isn't disconnected. It's decentralized. The intelligence lives on the machine, where it's fast, sovereign, and immune to network outages.
When the internet goes down — and in a factory, it will — our systems don't even notice. The cameras keep inspecting, the microphones keep listening, the PLCs keep acting. Logs cache locally and sync when connectivity returns. That's not a nice-to-have. For a manufacturer running a $22,000-per-minute production line, that's the difference between a "smart factory" that's actually fragile and an intelligent factory that's genuinely robust.
The Uncomfortable Truth About Industry 4.0
I want to end with something that might be controversial in the industrial AI community, but I believe it deeply.
The last decade of Industry 4.0 was built on a lie — not a malicious one, but a lie nonetheless. The lie was that centralization was the path to manufacturing intelligence. Aggregate everything in the cloud. Build data lakes. Train massive models on massive datasets in massive data centers. The cloud providers sold this vision hard, and manufacturers bought it because it sounded like progress.
It was progress — for monitoring. For analytics. For long-term trend analysis. The cloud is brilliant at answering questions like "What was our defect rate last quarter?" or "Which supplier's materials correlate with higher scrap rates?" Those questions can tolerate seconds, minutes, even hours of latency.
But somewhere along the way, people confused monitoring with control. They tried to close the loop through the cloud — to make real-time decisions about physical processes by routing data through the public internet. And that's where the architecture broke, because the physics of a conveyor belt and the physics of a wide-area network are fundamentally incompatible.
The future of industrial intelligence isn't in the cloud. It's on the device, at the point of action, where code meets kinetic energy. It's a $2,000 Jetson module that delivers 275 trillion operations per second, mounted on the machine it's protecting, making decisions in 12 milliseconds without asking anyone's permission.
We didn't set out to fire the cloud. We set out to catch defective parts on a conveyor belt. But the conveyor taught us something the cloud providers never will: in manufacturing, the only latency that matters is zero. Everything else is a compromise with physics, and physics doesn't negotiate.