Your Recycling AI Is 1.5 Meters Too Late — And Physics Won't Wait
I watched a crushed PET bottle sail past a pneumatic ejector at four meters per second, untouched, and I knew something was fundamentally broken.
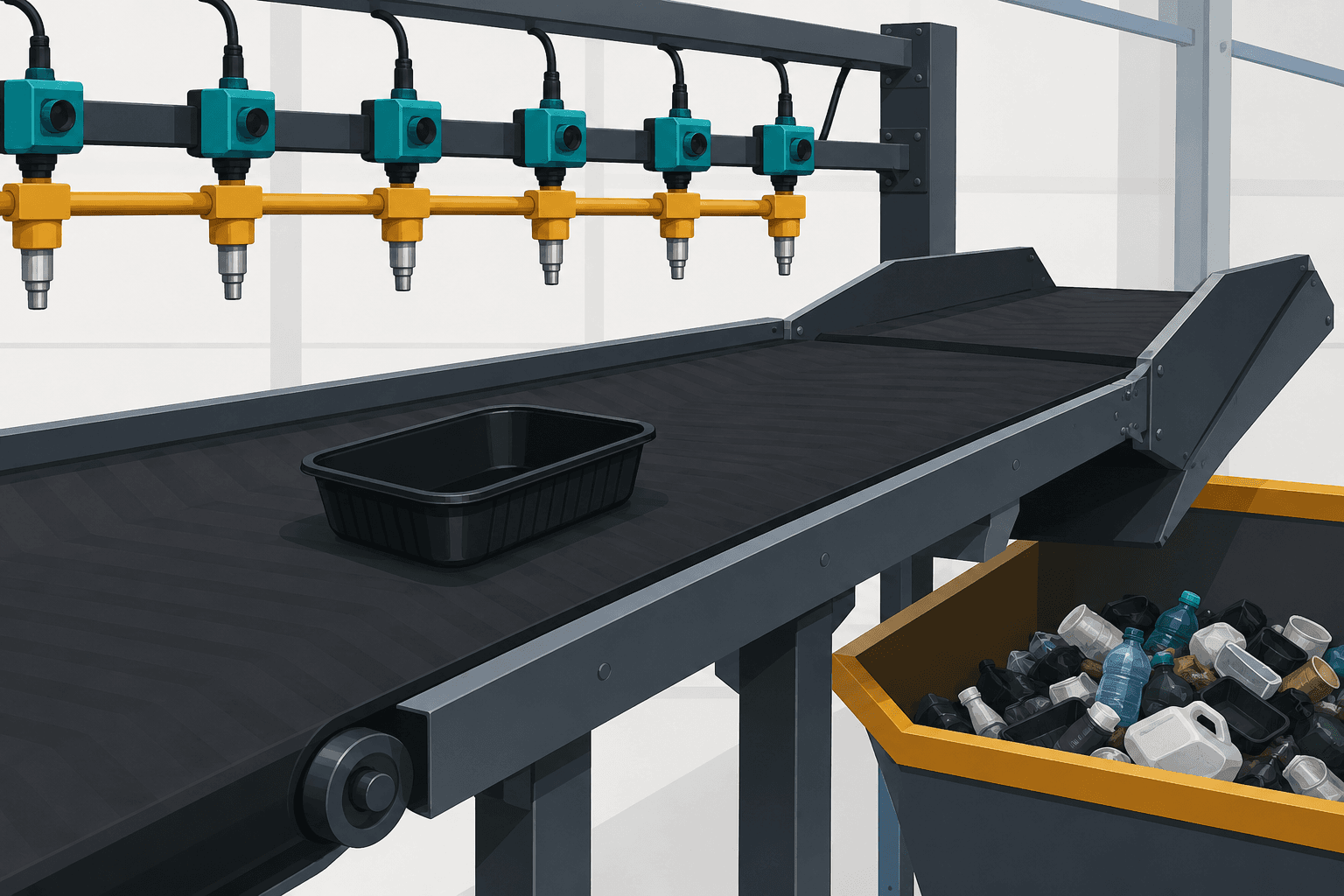
We were standing in a Material Recovery Facility — an MRF, in industry shorthand — somewhere loud and hot, watching a demo of a cloud-connected AI sorting system. The pitch was slick. The dashboard was beautiful. The neural network could identify seventeen material types with impressive accuracy on a test bench. But on the live belt, with real trash moving at real speed, the system kept missing. Not because the model was wrong. Because the answer arrived too late.
That moment crystallized something I'd been circling for months. The recycling industry doesn't have an AI accuracy problem. It has a physics problem. And no amount of model fine-tuning or API optimization will fix it, because the constraint isn't in the algorithm — it's in the architecture.
I went back to our office and did the math that now sits at the center of our research on FPGA edge AI for material recovery. The number that changed everything: 1.5 meters. That's how far a piece of recyclable material travels on a standard conveyor belt during the time it takes a cloud AI system to think.
What Happens in 500 Milliseconds?

Half a second sounds like nothing. You blink in about 300 milliseconds. But on a conveyor belt running at 3 meters per second — a modest speed for modern sorting lines — 500 milliseconds means the object has moved a meter and a half. At 6 meters per second, which high-throughput facilities like those using TOMRA's SPEEDAIR technology routinely hit, that number doubles to 3 meters.
A standard cloud AI inference round-trip — camera capture, encoding, transmission, queuing, GPU batching, inference, return — takes roughly 500 milliseconds. That's not a worst case. That's a realistic aggregate of every step in the chain.
At industrial belt speeds, a 500ms cloud inference delay creates a blind displacement of 1.5 to 3.0 meters — far exceeding the precision required for pneumatic ejection.
The ejection mechanism on these machines is a row of tiny pneumatic valves, spaced 12.5 to 31 millimeters apart, that fire precise blasts of compressed air. They need to hit the center of mass of a specific bottle, can, or plastic fragment without disturbing the material next to it. The spatial tolerance is measured in millimeters. The cloud is delivering answers measured in meters.
I remember explaining this to an investor who kept asking why we couldn't "just use a faster API." I pulled up a napkin and drew the conveyor, the camera, the cloud, the ejector. I wrote the equation — displacement equals velocity times time — and watched his face change. It's the simplest equation in physics, and it demolishes the entire cloud-AI-for-sorting thesis.
Why Can't You Just "Look Ahead"?
This is the first objection everyone raises, and it's reasonable. If the cloud takes 500 milliseconds to respond, just mount the camera 1.5 meters upstream and let the system "look ahead," right?
We tried reasoning through this. My team spent two weeks modeling it, and the answer is: it works on a whiteboard and falls apart on a factory floor.
The problem is that conveyor belts are not precision instruments. They vibrate. The motors hum at frequencies that make lightweight plastics drift laterally. At speeds above 4 meters per second, thin films and paper behave like tiny airfoils — operators call it the "flying carpet" effect — lifting off the belt surface and fluttering unpredictably. Heavy glass bottles roll into plastic trays, knocking both off course.
Over a 1.5-meter travel distance, these stochastic forces compound. A lightweight container that was perfectly centered under the camera might be two centimeters to the left by the time it reaches the ejector. Linear tracking algorithms can compensate for constant belt velocity, but they can't predict collisions between a glass jar and a yogurt cup that haven't happened yet.
There's also the brute physical constraint. In brownfield installations — which is most of the recycling industry — you can't just extend a conveyor line by two meters. You'd need to re-engineer the plant layout, move gantries, alter feed angles. The CapEx is enormous, and you're spending it to accommodate a slow AI system rather than fixing the slowness.
And then there's the option nobody wants to talk about: slowing down the belt. If you can't sort accurately at 4 meters per second, drop to 1 meter per second. Problem solved — except you've just cut your facility's processing capacity by 75%. In an industry running on thin margins per ton, that's not a compromise. That's a death sentence for the business case.
The Enemy You Can't See: Jitter
Average latency is bad enough. But the real killer is jitter — the variation in that latency from one inference to the next.
A cloud system might average 500 milliseconds, but individual requests fluctuate. One comes back in 480ms, the next in 520ms, and occasionally one takes 600ms because a router buffer filled up somewhere in Ohio. That ±50ms variation creates a firing uncertainty window of 100 milliseconds. At 3 meters per second, 100ms is 300 millimeters of travel.
To guarantee a hit within that window, the system would need to fire a burst of compressed air covering a 30-centimeter zone. That wastes enormous amounts of compressed air and ejects everything in that zone — the target material and the good material sitting next to it. Purity collapses.
I had a heated argument with a colleague about this. He insisted that 5G edge cloud would solve the jitter problem. I showed him the numbers: even 5G edge introduces 20 to 50 milliseconds of latency with its own jitter profile. At 6 meters per second, 20ms is still 120 millimeters of displacement. Better than cloud, but still an order of magnitude too imprecise for valves spaced at 12.5mm pitch.
In high-speed sorting, tail latency — the 99th percentile delay — matters more than average latency. If 1% of packets arrive late, 1% of your sorted material is wrong.
For a facility processing 50 tons per hour, a 1% purity drop means 500 kilograms of contaminants per hour sneaking into what should be clean bales. That's enough to downgrade a bale from Grade A to Grade B, or trigger outright rejection by a buyer. The economics unravel fast.
Why We Chose Programmable Silicon

Once I understood that the problem was architectural — not algorithmic — the solution space narrowed dramatically. We needed inference latency under 2 milliseconds, and we needed that number to be deterministic. Not "usually under 2ms." Always under 2ms. Every single time.
That requirement eliminates GPUs, even edge GPUs. A local GPU can hit 15 to 50 milliseconds, which is far better than cloud, but it's variable. GPUs run on operating systems. Operating systems context-switch, handle interrupts, journal file systems, and occasionally decide it's a great time to run a background update. Even Real-Time Linux (PREEMPT_RT) is fundamentally a time-sharing system. It can't guarantee that the AI inference won't be interrupted by a network driver or an SSH daemon.
So we turned to FPGAs — Field-Programmable Gate Arrays. And this is where I need to explain something that took me a while to fully internalize, even with a technical background.
An FPGA is not a processor. It doesn't execute instructions. You don't write software for it in the traditional sense. Instead, you configure its silicon fabric to become the circuit that implements your algorithm. The neural network isn't a program running on hardware — it is the hardware.
This distinction sounds academic until you see what it means for latency. A CPU fetches an instruction, decodes it, fetches data, executes, stores the result, and repeats this billions of times. An FPGA has no instruction fetch. No program counter. The data flows through a physical pipeline of logic gates like water through a pipe. As soon as the first pixel arrives from the camera sensor, processing begins. The system doesn't wait for a complete frame to be buffered.
The result: deterministic inference under 2 milliseconds. At 3 meters per second, that's 6 millimeters of object displacement. At 6 meters per second, 12 millimeters. Both well within the precision envelope of pneumatic ejection nozzles.
An FPGA-based vision system can have the inference result for the top of an image ready before the camera has finished transmitting the bottom of the image.
How Do You Fit a Neural Network on a Chip?
There was a night — late, too much coffee, the office empty — when I was staring at the memory specifications of the FPGA we'd selected and doing the arithmetic on our model's weight count. The numbers didn't add up. Our neural network was too large for the chip's on-chip memory. An FPGA has megabytes of fast internal storage, not the gigabytes of VRAM you get on a GPU.
This is the historical knock on FPGAs for AI: they're fast but small. And for a while, I thought we'd hit a wall.
The breakthrough was quantization — specifically, aggressive quantization combined with a training technique called Quantization-Aware Training, or QAT.
Here's the core idea. Neural networks are typically trained using 32-bit floating point numbers (FP32) because the math during training needs to be precise. But once a model is trained, those 32-bit weights carry far more precision than the task actually requires. Telling a PET bottle from an HDPE milk jug is a macroscopic visual distinction — shape, opacity, label texture. You don't need 32 bits of numerical precision to capture that.
We compress our models to INT8 (8-bit integers), which cuts memory footprint by 4x. Then we push further to INT4 (4-bit integers) for weight-heavy layers, which cuts it by 8x. Our internal benchmarks show INT4 delivering up to a 77% performance boost over INT8 on compatible FPGA hardware, while maintaining accuracy above 99% of the original FP32 model.
The key is QAT. Unlike crude post-training quantization that just truncates weights and hopes for the best, QAT simulates quantization noise during training. The network learns to be robust to lower precision. It's the difference between asking someone to paint with a thick brush after they've mastered fine brushwork, versus teaching them to paint beautifully with a thick brush from the start.
With quantized models, the entire neural network fits in the FPGA's on-chip Block RAM. No external memory access. No DRAM bottleneck. Data moves at terabytes per second within the chip. We use frameworks like FINN and hls4ml to map specific network layers to specific FPGA resources, tuning the parallelism of each layer to match the throughput of the camera sensor so the pipeline never stalls.
What Does "Zero Operating System" Actually Mean?

We run our critical inference path on bare metal. No Linux. No Windows. No operating system at all on the part of the chip that does the thinking and acting.
People always ask me if that's extreme. It is. It's also necessary.
The FPGA chips we use — AMD Xilinx Zynq UltraScale+ — are heterogeneous systems on a single piece of silicon. They contain both programmable logic fabric and hard ARM processor cores. We split the workload across three domains:
The FPGA fabric handles the vision pipeline, neural network inference, and valve control signals. Pure hardware logic. Zero jitter. The Real-Time Processing Unit — an ARM Cortex-R5 running bare-metal C++ — manages configuration, state machines, and safety interlocks with strictly bounded interrupt latency. And a separate Application Processing Unit running Linux handles the non-critical stuff: logging data, serving the web UI, managing remote updates.
The thinking and acting paths are completely isolated from the reporting path. If the Linux partition crashes — and Linux does crash — the FPGA continues sorting material at full speed without interruption. I've seen this happen during testing. The dashboard went dark, the log stream stopped, and the sorting line didn't skip a beat. That's when I knew the architecture was right.
For the full technical breakdown of this architecture — the dataflow pipeline, the quantization schemes, the bare-metal synchronization engine — see our detailed research paper.
Why Does This Matter for the Circular Economy?
Let me translate the milliseconds into money.
A typical MRF processing PET plastic with cloud-limited AI caps its belt speed at around 2 meters per second to accommodate latency and tracking errors. Throughput: roughly 5 tons per hour per meter of belt width. With FPGA edge inference at 2ms latency, that belt speed can triple to 6 meters per second. Throughput: 15 tons per hour. Same belt. Same building. Same footprint.
That's a 300% increase in processing capacity. For a facility running two shifts — 16 hours — that's 160 additional tons processed daily. With recycled PET trading between $400 and $800 per ton, the revenue implications are measured in millions annually.
But throughput is only half the story. Precision matters just as much. Precise ejection means fewer contaminants sneaking into clean bales (higher purity, premium pricing) and fewer target materials accidentally missed and sent to landfill (higher yield, less waste). Even a 1-2% improvement in recovery rate significantly reduces lost revenue and lowers landfill tipping fees, which are rising globally.
Then there's the operational cost. No cloud egress fees. No API charges per inference. No bandwidth costs for streaming high-definition video to a data center. And FPGAs consume 10 to 20 watts for the inference workload, versus 100 to 200 watts for a comparable GPU setup — a 10x efficiency advantage that compounds across dozens of sorting stations running 24/7.
The shift from cloud to edge FPGA is not a technical preference. It's the difference between a recycling facility that works on paper and one that works at speed.
The Moat That Matters
I get a version of this question regularly: "Aren't you worried about commoditization? What happens when NVIDIA ships a faster edge GPU?"
Here's what I've come to believe. In an era where calling an API to classify a bottle in a static JPEG is a weekend project, the moat isn't the model. It's the physics. It's the ability to identify and eject that bottle moving at 6 meters per second, amidst a chaotic stream of crushed cans and wet cardboard, with 99% purity, 24 hours a day, without an internet connection.
That requires hardware-software co-design — selecting the FPGA silicon, writing the HDL, designing custom quantization schemes, integrating sensor drivers, and locking vision inference to encoder pulses for sub-millimeter ejection accuracy. It's not something you get by wrapping an API.
The current AI landscape is full of firms operating at the application layer, disconnected from the physical reality of industrial operations. We operate at the physical layer. We don't train a model and hand it over. We design the circuit that the model becomes.
The recycling industry is at an inflection point. Purity standards are tightening. Post-consumer waste streams are getting more complex. Labor is scarce. Everyone agrees AI is the answer. But the conversation has been stuck on which model to use, when the real question is where and how fast that model runs.
A 500-millisecond delay is not a technical inconvenience to be optimized away. It is a physical impossibility for a process that operates at 3 to 6 meters per second. The equation is simple — displacement equals velocity times time — and it doesn't care about your cloud provider's SLA.
The future of the circular economy depends on intelligence that is fast, deterministic, and located at the exact point where the air blast meets the bottle. Not in a data center. Not in the cloud. On the chip, at the edge, in the millisecond that matters.